
ICS 29.020; 13.110
J 09
GB 18209. 3—2010/IEC 61310-3:2007
代替 GB 18209. 3—2002
EIeCtriCal Safety Of machinery—IndiCatiOn 9 Inarking and actuation— Part 3 Requirements for the location and OPeratiOn Of actuators
(IEC 61310-3 :2007 ∙ Safety Of machinery—IndiCatiOn, marking and actuation—Part 3 : ReqUirementS for the IOCatiOrL and OPeratiOn Of actuators .IDT)
2011-01-14 发布
2011-12-01 实施
中华人民共和国
家标准 机械电气安全指示、标志和操作
3部分:操动器的位置和操作的要求
GB 18209. 3—2010/IEC 61310-3:2007
屮国标准出版社出版发行 北京复兴门外三里河北街16号 邮政编码:100045
网址:www. gbl68. Cn 服务热线 1O1O-68522OO6 2011年7月第一版
⅛
书号:155066 • 1-42453
版权专有侵权必究

本标准的全部技术内容为强制性。
GB 18209《机械电气安全 指示、标志和操作》拟分成部分出版,已经发布以下部分:
——第1部分:关于视觉、听觉和触觉信号的要求;
--第2部分:标志要求;
——第3部分:操动器的位置和操作的要求。
本部分为GB 18209的第3部分。
本部分按照GB/T 1. 1—2009给出的规则起草。
本部分代替GB 18209.3—2002«机械安全 指示、标志和操作 第3部分:操动器的位置和操作的 要求》,与GB 18209. 3—2002相比主要技术变化如下:
——标准名称改为《机械电气安全 指标、标志和操作 第3部分:操动器的位置和操作的要求》;
--技术内容有增补,表述用词有改动。
本部分使用翻译法等同采用IEC 61310-3:2007«机械安全 指示、标志和操作 第3部分:操动器 的位置和操作的要求》。
与本部分中规范性引用的国际文件有一致性对应关系的我国文件如下:
GB/T 4025—2010
(IEC 60073:2002,IDT)
GB/T 4205—2010
GB/T 14777—1993
GB/T 19671—2005
GB 18209. 1—2010
要求(IEC 61310-1:2007 JDT)
GB 18209. 2—2010 机械电气安全
IDT)
本部分做了下列编辑性修改:
——标准名称改为《机械电气安全
——删除国际标准前言。
本部分由中国机械工业联合会提岀O
=1
人-机界面标志标识的基本和安全规则指示器和操作器的编码规则
人-机界面标志标识的基本和安全规则 操作规则(IEC 60447:2004 JDT) 几何定向及运动方向(neq ISO 15Q3 :1997)
机械安全 双手操纵装置 功能状况及设计原则(ISO 13851 :2002,MOD) 机械电气安全
指示、标志和操作 第1部分:关于视觉、听觉和触觉信号的
指示、标志和操作 第2部分:标志要求(IEC 61310-2:2007,
指标、标志和操作 第3部分:操动器的位置和操作的要求》;
本部分由全国工业机械电气系统标准化技术委员会(SAC/TC 231)归口。
本部分主要起草单位:华测检测技术股份有限公司、北京机床研究所、北京凯恩帝数控技术有限公 司、四川长征机床集团有限公司、沈阳机床(集团)有限责任公司。
本部分主要起草人:黄祖广、郭勇、黄麟、赵钦志、杨洪丽、金朝晖、李军。
本部分于2002年10月首次发布,本次为第一次修订。
1范围
本部分规定了在人机接口用手或人体的其他部分操纵的操动器的有关安全要求。
本部分规定一般要求如下:
——操动器运动的一般方位;
--个操动器相对其他操动器的布置;
—作用与其最终效应之间的相关性O
本部分以IEC 60477为基础,但也适用于非电工技术工艺.如机械和流体动力系统。
本部分适用于单个操动器和构成组件部分的操动器组。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件.仅注日期的版本适用于本文 件。凡是不注日期的引用文件.其最新版本(包括所有的修改单,适用于本文件。
GB/T 15706.2—2007 机械安全基本概念与设计通则 第2部分:技术原则与规范
(ISO 12100-2:2003, IDT)
ISO 1503 :1977 几何定向及运动方向(GeOmetriCal OrientatiOn and directions Of movements)
ISO 9355-2 :1999显示器和操动器设计的人类工效学要求 第2部分:显示器(ErgOnOmiC requirements for the design Of di splays and COntrOl actuators一Part 2 : DiSPlayS)
ISC) 13851:2002 机械安全 双手操纵装置 功能状况及设计原则(Safety Of machinery一Two-hand COntrOl devices—FUnCtiOnaI aspects and CleSign PrinCiPIeS)
IEC 60073:2002 人-机界面标志标识的基本和安全规则 指示器和操作器件的编码规则
IEC 60447:2004 人-机界面标志标识的基本和安全规则 操作规则
IEC 61310-1机械安全 指示、标志和操作 第1部分:关于视觉、听觉和触觉信号的要求
IEC 61310-2 机械安全 指示、标志和操作 第2部分:标志要求
3术语和定义
IEC 61310-1和IEC 61310-2界定的以及下列术语和定义适用于本文件。
3. 1
动作 action
人身体的一部分(例如:指、手、脚)为操纵操动器所需的运动。
3.2
最终效应 final effect
操作者动作的预期结果。
4 一般要求
在机械设计的早期阶段就应考虑本部分,并应在机械装配的全过程以明确方式加以应用。应对机 械的预期应用的场合和因机械几何走向以及操作者的位置、技能、姿态和观察方向(见IEC 61310-1 Φ
4. 2. 2)所受到的限制加以考虑。见ISO 1503o
操动器应是:
---可明确识别的(见IEC 61310-1和IEC 60073);
--适当地做了标志的(见IEC 61310-2);
——设计时保证操作的安全性和实时性(见IEC 60447);
——按照有关的人类工效学原则选择和设计(见ISO 9355-2);
——设计和选择能承受预期的环境和使用条件;
——设计能够避免使用中可预知的磨损和破裂的。
操动器的布置应使:
——它们在危险区外,只有那些必须安置在危险区内的操动器例外,例如:急停、示教吊挂装置等。
(见 GB/T 15706.2—2007 中 4. 11. 8 c));
——操作不能引起附加的危险;
——操作者能够判明最终效应已经实现(直接或通过反馈/应答装置);
——根据第5章,操动器的作用与其最终效应是一致的(更详细的信息见IEC 60447);
——避免面板的镜像对称布置。
无论在什么情况下•起动操动器的位置应使操作者在操纵时能够看到受操纵的元件(见 GB/T 15706. 2—2007 中 4. 11. 8 CI))O
停止操动器应放在靠近每个起动操动器的地方。起动/停止功能通过保持运转操作装置来执行的 场合,若松手时由于保持运转操动器失灵无法传递停止指令可能会引起危险时•应配置单独的停止操动 器(见 GB/T 15706. 2—2007 中的 4. 11.8 b))o
操动器应根据它们用于控制过程、机械或设备的操作或功能关系进行逻辑组合(见IEC 60447) o 操作时,操动器不应导致设备不确定或危险状态。
操动器的意外操作可能导致危险情况应尽量避免。必要时•应采用下列一种或多种结构措施:
——凹进或覆盖的操动器;
——增加操动器的操纵力;
——使用锁紧装置;
——操动器置于不可能被偶然碰撞的地方;
——使用一组需要按顺序作用的操动器;
——使用双手控制装置(见ISO 13851);
——使用使能器件;
——遥控禁止使用功能。
作用是间接引发(例如采用键盘)时,应清晰显示要进行的操作并应给操作者明确的操作确认(视觉 和听觉的反馈)(见GB/T 15706. 2—2007中的6.3)O
涉及高要求的安全功能时,操作者的视觉完全被占用或能见度条件受限制的情况下,操动器的位置 通过触觉应容易辩认(关于触觉信号的具体要求见GB 18209. 1) O 5动作和效应
注:附加信息见ISO 9355-2o
5. 1原则
一台机械,对于操作者,施加在操动器的动作和最终效应之间的相关性应明显。基于动作和最终效 应,这种相关性可分为两组。
中间结果导致最终效应在本部分中不做考虑。
注:例如,对于可变速传动装置,最终效应是运转速度,它由动作引起,而不是数据处理单元的输出指令引起,也不 是由磁场调整器的变化引起。
5. 2最终效应
巾动作引起的最终效应通常能分为两组相对的效应。
lη⅛
对于不能根据增加/减少的效应来划分的最终效应,例如试验、帮助、使能器件等,这些操动器的布 置应仍遵循第4章。
表1所示不同类型的效应可分为两组(也见IEC 60447的表A. 2)。
表1最终效应的分类
|
效应的类别 |
引起的最终效应 | |
|
组1 |
组2 L_ _ ______ ‘ | |
|
物理量(电压、电流、功率、速度、频率、 温度、光强度等)的变化 |
_____ _ ___ 增加 |
减少 |
|
投入运行 ~ |
退出运行 | |
|
起动 |
停止 | |
|
条件的变化 |
加速 |
制动 |
|
接通电路a |
断开电路h | |
|
点燃 |
熄灭 | |
|
受控物体或运载工具相对于基本轴的 |
--- 向上 |
向下 |
|
运动 |
向右 |
向左 |
|
相对于操作者的运动 |
向前离开操作者 |
向后朝向操作者 |
|
a如果组合使用,那么接通相关的接地电路。 b如果组合使用,那么断开相关的接地电路. | ||
5.3动作
动作还可基于以下两点分为两类:
—操动器具有两个操作方向时就对应两个运动方向。那么动作是人体某部分的相关运动;
——只有单一操作方向(如上升)的一组操动器,只产生一个最终效应,任一给定操动器在组中有固 定位置。那么此动作是人体一部分朝向给定操动器的运动.
按动作的特征分为组1和组2(见表2)是基于:
--动作的两个方向;
--动作施加点。
表2(与IEC 60447中的表A. 1等同)表示一个作用如何按操动器的不同类型和布置分类,附录A
(与IEC 60447的附录B等同)给出单一功能操动器的例子。
操动器的类别
动作类别
手轮、手柄.旋钮
转动
垂直运动
表2动作的分类
顺时针rʌ
向上
动作方向
逆时针厂、
向下
基本上是线性运动的把手、 操纵杆、推拉式按钮等a
右一左
向右
向左
操动器组的类别
一个在另 一个的上面
水平
运动
前一后a
动作类别
离开操作者®
动作施加点
|
5 |
"δ" | |
|
O |
动作施加在上 |
方的操动器
朝向操作者
具有相反效应 的一组把手、 按钮、拉杆、拉 线等
动作施加在下 方的操动器
按、拉等
一个在另 一个的旁边
动作施加在
右方操动器
动作施加在左方 操动器
操动器组的类别
动作类别
动作分类
带有XY-VDU控制器的VDT
移动和点击
键盘
击打键
动作的方向和施加点:不分类b
敏感区域
触、碰
a更多的信息见IEC 60447o
b应尽可能用表2上部的规则。
5∙ 4动作和最终效应之间的相关性
组1动作应导致组1最终效应。
组2动作应导致组2最终效应。
例如:
a) 手轮的顺时针旋转导致速度增加;
b) 操纵杆向左移动导致物体向左运动;
C)操纵柄的运动是在与受控物体的预期运动相同的方向上。
当操作者与机械的相对位置会改变(特别是活动机械和/或遥控便携操动器组的情况)时,机械运动 的方向可能变得不明确,那么应在机械的活动部分上或其附近贴上适当标志并与操动器上或其附近的 符号和/或颜色一致。
因特殊理由(见注1和注2),已形成的习惯做法不符合上述原则时,则:
——人体部分的运动方向和导致的最终效应在操动器上或其附近应给出;
——为使这种做法符合(标准的)要求,应当通过改变所用的操动器的类型(例如由操纵杆改为按 钮)来实现G如操动器的类型不适合改变时,操作者应进行专门训练。
注1:这样的特殊理由可能包括这些情况:已经存在由式样特殊操动器的操作者确定的良好期望应有效。特殊理由 也包含这些情况:技术上难以保持动作与效应之间的相关性。例如,流体控制阀通常是顺吋针旋转使流量 减少。
注2:操动器的特殊种类和特殊用途的要求见GB/T 4205,例如:
——用控制杆升高和降低;
——推拉式按钮;
——脚踏操动器。
5.5停止
许多类型的操动器,有专门的位置留给停止效应。此位置应如下设置:
a) 对于离开停止操纵一个线性运动或角度运动的操动器"停止位置应在运动的最左端、最下端, 或逆时针的终点。
b) 对于离开停止操纵两个相反的线性运动或角度运动的操动器•停止位置应在动程的中间。
一组操动器,组中每个操动器给定一个最终效应且具有相同的操作方向•停止操动器应放在该操动 器组的左端或下端。
一组操动器引发相反效应时.停止操动器应放在该组操动器的中间。
注:紧急停止操动器的要求见GB 5226. 1 JEC 60947-5-5和GB 16754o
附录 A
(规范性附录)
单一功能操动器的典型示例
A. 1操动器的类型
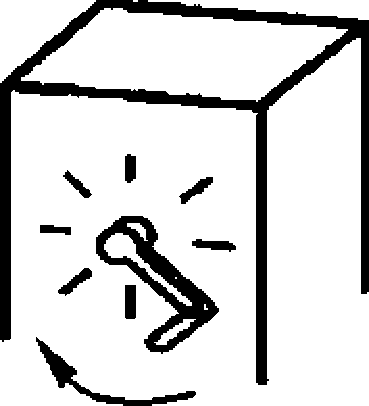
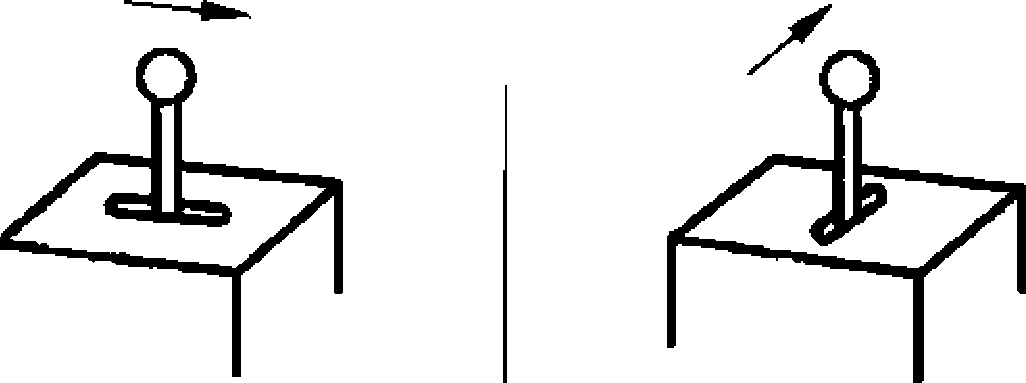
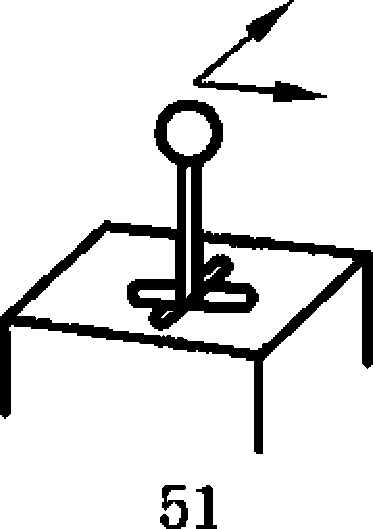
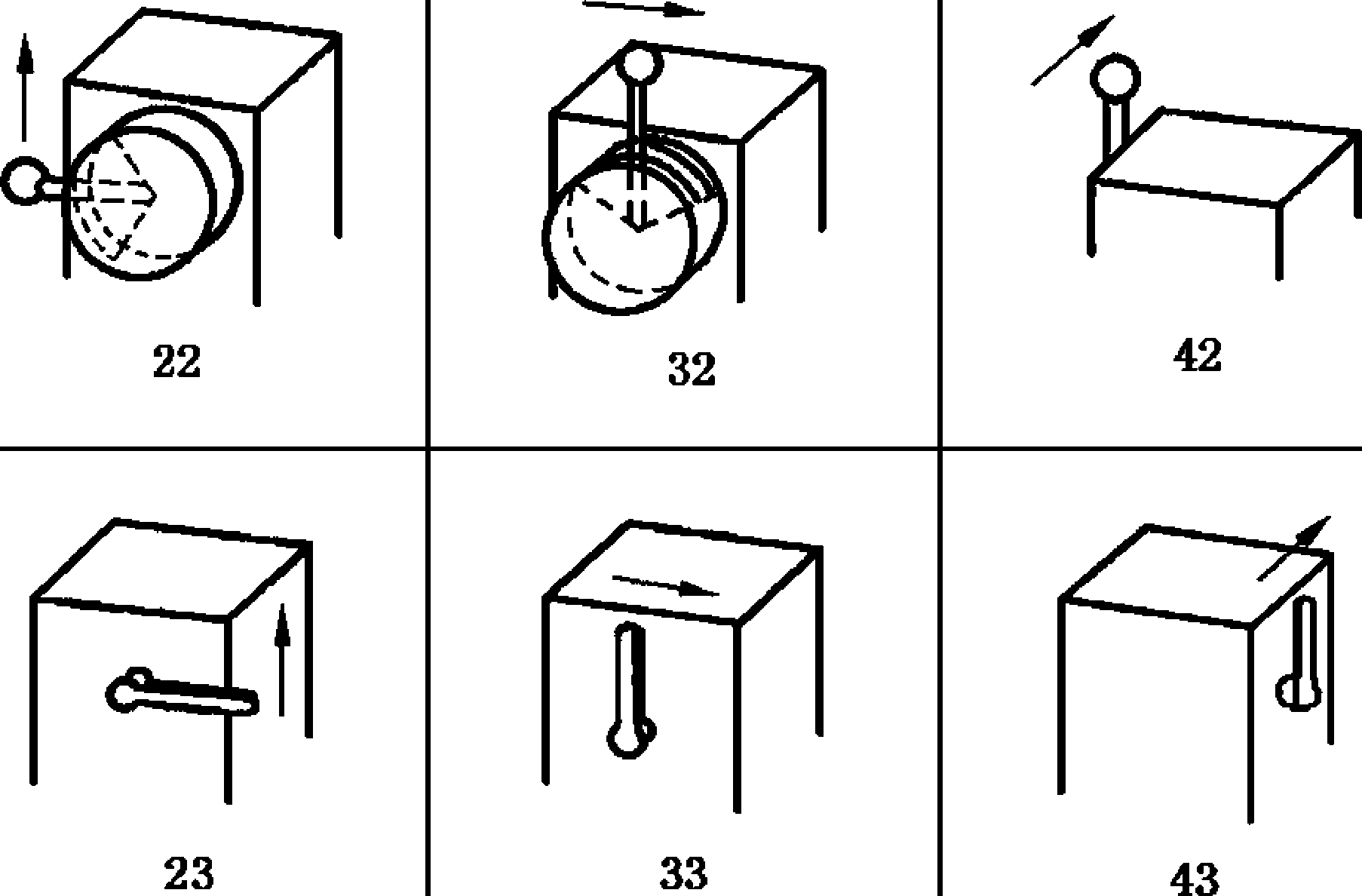
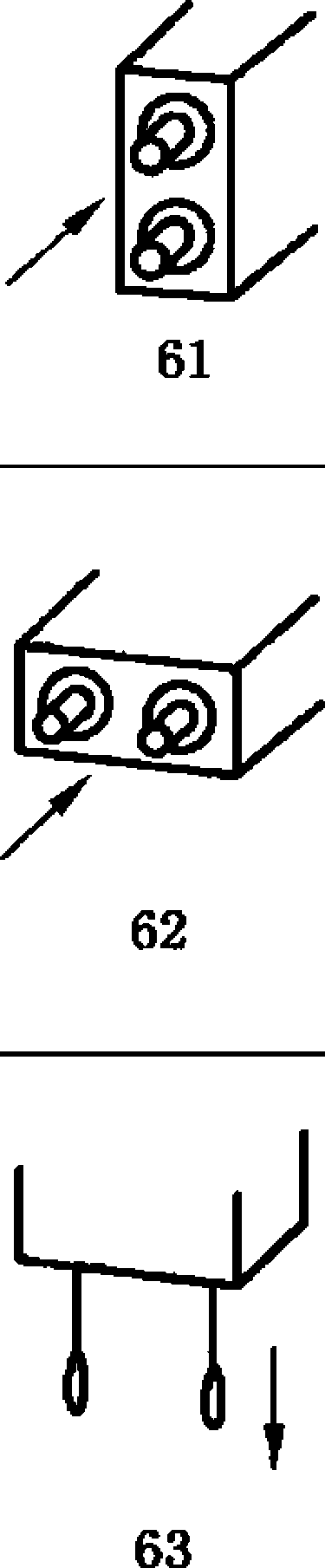
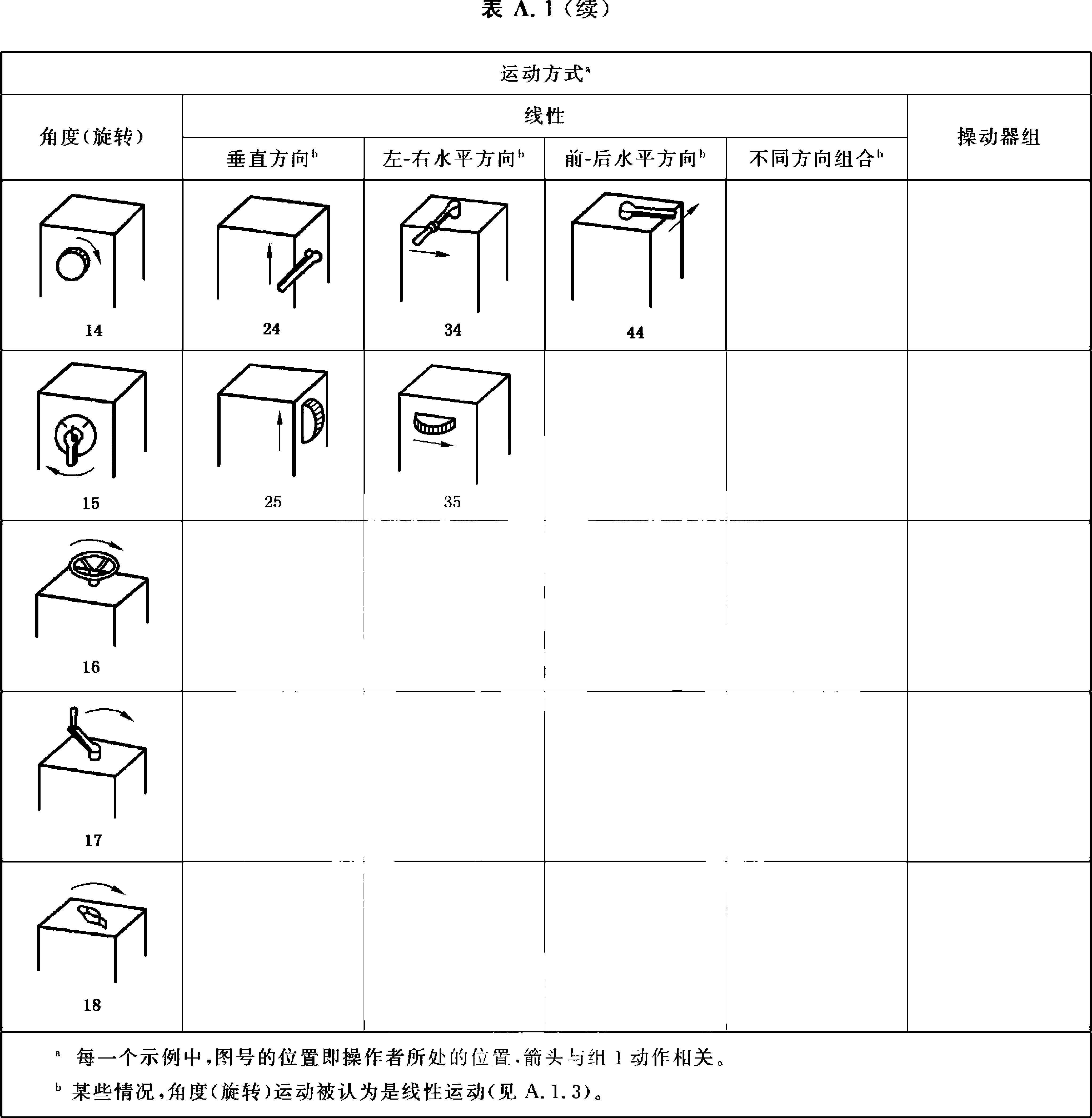
A. 1. 1 概述 表A. 1所示是操动器的典型示例,每个图中的箭头表示已分类并导致最终效应的动作(按照表2)o
操作方向是由人站在操作位置面向操动器来确定的。表中各图的操作位置由图号的位置指示。
A. 1.2旋转
如果旋转手柄配有角度指示器.则其运动总是看作旋转(见表A. 1的例15)。
从三个基本坐标轴的一个轴向另一个轴的运动.看作旋转运动(如表A. 1的例13)。
A. 1.3线性运动
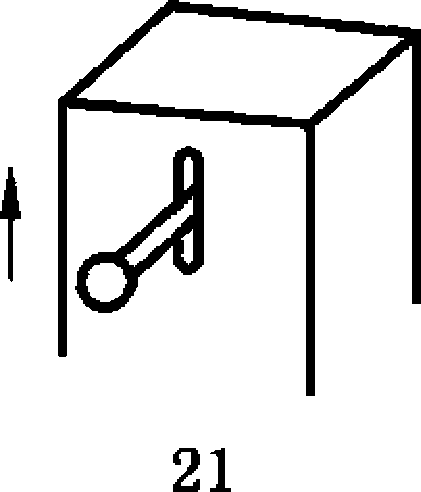
实际上是平行于基本轴的运动,即在另一个轴的两边均等同分布的运动.在总的允许角度运动不超 过120°时,被认为是线性运动(见表At 1的例22,23.24.32,33,34,42.43和44)o
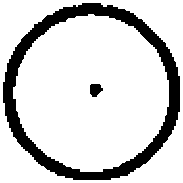
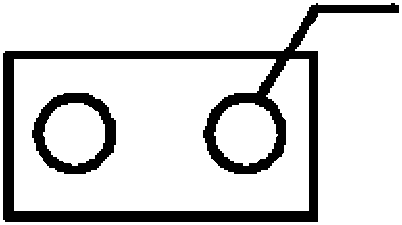
当角度位移较小(见表A. 1的例21,31,41和51),或只有旋转操动器外圆小部分可接近或可以看
到时,例如有一部分处在外壳内的手轮或搁在槽里的旋钮(见表A. 1的例25和35),这类操动器被视为
具有线性运动。
表A. 1某些类型的操动器运动方向示例
运动方式,
线性

11
12

13
操动器组
垂直方向b 左■右水平方向L 前'后水平方向L
不同方向组合”
31 41

[1] GB 5226. 1—2008机械电气安全机械电气设备第1部分:通用技术条件(IEC 60204-1: 2005,IDT)
[2] GB/T 15706. 1—2007 机械安全 基本概念与设计通则 第1部分:基本术语和方法 (ISO 12100-1:2003,IDT)
[3] GB 16754—2008 机械安全 急停 设计原则(ISO 13850:2006,IDT)
_4] IEC 60947-5-5 : 2005 LOW-VOltage SWitChgear and COntrOIgear——Part 5-5 : COntrOl CirCUit devices and SWitChing elements——EIeCtriCal emergency StOP device With mechanical IatChing function
GB 18209. 3-2010
8OCUPO29。/OEI60ES
版权专有侵权必究
书号 s155066 • 1-42453