
·标准研究与分析·
电器与能效管理技术(2017No∙14)
ISO/TS15066协作机器人技术规范解读
王爱国
上海电器科学研究所(集团)有限公司,上海200063]
摘 要:基于目前国内尚无协作机器人相关技术规范的现状,从增加的术语及定 义,协作机器人系统设计,协作机器人系统应用要求、验证和确认,使用信息方面详细 地解读了 ISO/TS 15066: 2016《机器人及机器人装置协作机器人》。通过解读,可使相 关人员及时准确地了解ISO/TS 15066: 2016。
关键词:协作机器人;安全;机械碰撞;功能安全
中图分类号: TP 242 文献标志码:A文章编号: 2095-8188( 2017) 14-0069-05
DOI: 10.16628/j. cnki. 2095-8188. 2017. 14. 016
王爱国(1976—), 男,工程师,主要从 事低压电器检测设 备的研究。
Interpretation for ISO /TS 15066 Technical Specification of Collaborative Robots
WANG Aiguo
[Shanghai Electrical Apparatus Research Institute ( Group) Co.,Ltd. Shanghai 200063]
Abstract: For collaborative robot safety,ISO formally promulgated the ISO/TS 15066 international standard in 2016. At present,there are no related collaborative robot standards in China. In order to better understand the main content of this standard in time and accurately,the main content of ISO/TS 15066 international standard is explained in detail in this paper.
Key words: collaborative robot; safety; mechanical collision; functional safety
0 引言
协作机器人的定义为被设计成可以在协作区 域内与人直接进行交互的机器人。协作机器人最 大特点是能够直接和人协同工作而无需使用安全 围栏进行隔离,其安全防护设计要求更高。协作 机器人具有灵活易用、用户友好等特点口-]。这 种机器人通常针对微小零部件组装,比如3C行 业等。目前主要协作机器人为Rethink Robotics 的Baxter机器人、ABB的Yumi及优傲机器人的 UR3、UR5、UR10等。
随着机器人销量爆发式的增长,机器人安全 问题也逐渐暴露。针对机器人安全的标准要求也 越来越紧迫。目前,国内现有关于协作机器人的 安全标准为GB 11291. 1 —2011《工业环境用机器 人安全要求第1部分:机器人》(等同采用ISO 10218-1 : 2006的标准,而相对应的ISO的最新标
准为 ISO 10218-1: 2011)、GB 11291.2-2013《工 业环境用机器人安全要求第2部分:机器人系统 与集成》(等同采用ISO 10218-2: 2011的标准), 此两份标准适合于传统工业机器人。除了具备传 统机器人的安全要求外,协作机器人还需特殊的 安全考虑,国际上协作机器人的技术规范ISO/TS 15066:2016《机器人及机器人装置协作机器 人》[4-]作为补充。但该技术规范处于研究阶段, 仍需大量的研究和测试工作,国内尚无协作机器 人的相关技术规范。
本文主要针对协作机器人的安全技术规范 ISO/TS 15066: 2016 进行解读。
1概况
本技术规范规定了协作机器人的安全要求, 是对ISO 10218-1与ISO 10218-2标准的补充,适 用于在ISO 10218-1和ISO 10218-2定义的工业机 — 69 —
(C) 1994-2022 China Academic Journal Electronic Publishing House. All rights reserved, http://www.cnki.net
电器与能效管理技术(2017No.14)
·标准研究与分析·
器人及工业机器人系统,不适用于非工业机器人, 但其提出的安全原则对其他领域仍具有借鉴 意义。
本技术规范引用了以下标准: ISO 10218-1: 2011《工业环境用机器人安全要求第1部分:机 器人》、ISO 10218-2: 2011《工业环境用机器人安 全要求第2部分:机器人系统与集成》、ISO 12100: 2010《机械安全-设计通则-风险评估与 风险减小》、ISO 13850: 2006《机械安全-急停-设计原则》、ISO13855: 2010《机械安全与人体部 位接近速度相关防护设施的定位》、IEC 60204-1: 2000《机械电气安全机械电气设备第1部分:通 用技术条件》
2 增加的术语及定义
本技术规范中使用到了ISO 10218-1: 2011, ISO 10218-2: 2011和ISO 12100标准中给出的术 语及定义,ISO/TS 15066: 2016增加了 7个术语及 定义。
(1)协同操作:协同操作是指专门设计的机 器人在规定的工作空间内直接与人一同工作的 状态。
(2)功率/机械功率:功率/机械功率是指机 械功率,或者单位时间消耗的能量。此处涉及的 功率与机器人铭牌标志上的功率不同。
(3)协同工作空间:在机器人工作单元的安 全防护空间内的工作空间中,机器人与人在生产 活动中可同时完成任务。
(4)静态接触:这种情况一般是指人体被机 器人和其他部件夹在中间。此时,机器人系统会 向被夹住的人体施加一个持续的力,直到该状态 被解除。
(5)瞬态接触:瞬态接触也被称作动态冲 击,指人体被机器人系统的移动部件所撞击,且 不会被机器人系统夹住或者困住,由此导致一 个短时的实际接触;瞬态接触依赖于机器人惯 性、人体惯性以及二者之间相对运动速度的 组合。
— 70 —
(6)防护间隔距离:任何机器人系统中的可 移动部件与处在协作机器人工作空间内的操作人 员之间的最小允许距离。最小允许距离的数值可 以是固定的或者是可变的。
(7)人体模型:人体模型是指具有人体独特 生物力学的结构所构成的模型。
3 协作机器人系统设计
3. 1 通则
本章节介绍了协作机器人与人协同工作的特 点,和传统机器人相比,协作机器人与人有重叠的 工作区域,如图1所示。
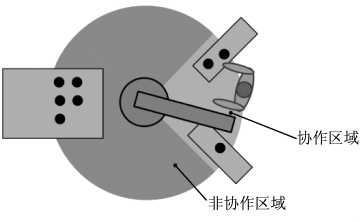
图1 协作机器人工作区域示意图
协作机器人应具备充分的保护措施来确保操 作人员的安全,针对协作机器人可能出现的各个 风险点,应进行充分的风险评估,以便降低并消除 协作机器人对人造成的危害。
3. 2 协同应用设计
本章节依据风险评估的原则,制定了相应的 限值,如协同工作空间的大小、协同工作空间与非 协同工作空间的划分、操作人员操作协作机器人 的权限设置、人员培训需求等。
3. 3 危险识别和风险评估
本章节针对风险点的考虑由2部分组成。第 一部分为根据ISO 12100 中定义的9大风险点: 机械危险、电气危险、热危险、噪声危险、振动危 险、辐射危险、材料物质产生的危险、人类工效学 危险、与机器使用环境有关的危险及组合危险;第 二部分为根据协作机器人的特点,针对性地考虑 协作机器人的风险点,如协作机器人与人的静态 接触、瞬态接触等。
本章节考虑的风险减小措施,通常分为3步
(C) 1994-2022 China Academic Journal Electronic Publishing House. All rights reserved, http://www.cnki.net
·标准研究与分析·
电器与能效管理技术(2017No∙14)
进行:
(1)本质安全设计措施。该措施通过适当选 择机器的设计特性和/或暴露人员与机器的交互 作用,消除危险或减小相关的风险。
(2)安全防护和/或补充保护措施。该措施 考虑到预定使用和合理预见的误用,如果通过本 质安全设计措施消除危险或充分减小与其相关的 风险实际不可行,则可使用经适当选择的安全防 护和补充保护措施来减小风险。
(3)使用信息。尽管采用了本质安全设计措 施、安全防护和补充保护措施,但风险仍然存在 时,则应在使用信息中明确剩余风险。
此风险减小的“三步”策略与风险评估标准 ISO 12100规定的风险减小策略相吻合。
4 协作机器人系统应用要求
4. 1 通则
协作机器人应用满足ISO 10218-1: 2011和 ISO 10218-2: 2011的要求。本章节的内容是针对 上述两项标准的补充。
4. 2 安全相关控制系统性能
本章节是对功能安全的总体要求,应满足 ISO 10218-1: 2011 第 5. 4 章节的要求,或 ISO 10218-2: 2011第5.2章节的要求。
4. 3 协同工作空间的设计
本章节涉及到协作机器人工作空间设计的要 求,比如安全软限位、空间限位、安全距离、功能安 全等要求,ISO 10218-1:2011 和 ISO 10218-2: 2011 中都已描述,此处不再详述。
4. 4 协作机器人操作设计
本章节涉及到协作机器人操作设计的要求, 比如保护性措施、停止功能及使能器件等要求, ISO 10218-1: 2011 和 ISO 10218-2: 2011 中都已描 述,此处不再详述。
本章节还涉及到协同操作与非协同操作的 切换,由于协同操作与非协同操作的安全要求 不同,在切换时系统需要有可视化的安全 提醒。
4. 5 协同操作
4. 5. 1 通则
协作机器人操作应包括以下方式:与安全相 关的监控停止、手动引导、速度与位置监控、功率
与力限值。
4. 5. 2 与安全相关的监控停止
与安全相关的监控停止应当满足相关的功能 安全要求,同时操作人员与机器人协同操作时应 当满足表1中描述的功能安全要求。
表1 与安全相关监控停止真值表
操作人员与协作机器
机器人监控及停止功能 人工作区域之间的距离
|
工作区外 |
工作区内 | |
|
工作区外 继续运行 |
继续运行 | |
|
机器人 |
工作区内, | |
|
与协作机 |
机器人处于运 继续运行 |
保护停止 |
|
器人工作 |
行状态 | |
|
区域间的 |
工作区内, | |
|
距离 |
机器人在安全 继续运行 |
继续运行 |
|
监控停止状态 |
4. 5. 3 手动引导
手动引导功能是协作机器人特有的功能。手 动引导装置一般安装在机器人末端执行器附近, 操作人员手持该装置引导机器人运动。由于机器 人与操作人员直接接触,必须充分考虑到机器人 对操作人员的安全问题,尤其是功能安全必须满 足相关要求,如手动引导时的扭矩监控、速度监控 等功能,应具备ISO 10218-1: 2011第5.4章节的 要求。另外出于安全考虑,标准要求在手动引导 装置附近应配备三位置开关及急停装置。
4. 5. 4 速度与位置监控
当操作人员接近机器人时,机器人的速度 及位置的变化应当根据操作人员与机器人相 对速度及位置的变化而发生相应的变化,机器 人以这种方式监控和限制其运动速度,并监控 协同工作区域里各个部件和操作人员的距离。 机器人的运动必须保持在与操作人员的最小 距离之外,或者随着机器人与操作人员之间的 距离逐渐减小,机器人的运行速度将趋于缓 慢,直至停止运行。该速度与位置的要求应满 足ISO 13855相关要求。
机器人停止距离的定义及计算在标准GB 11291.2 —2013中有详细的描述,在此不再 赘述。
4. 5. 5 功率和力限值
在人机协作的过程中,会有意无意发生机器
— 71 —
(C) 1994-2022 China Academic Journal Electronic Publishing House. All rights reserved, http://www.cnki.net
电器与能效管理技术(2017No.14)
·标准研究与分析·
人与人的碰撞事件,因此在设计协作机器人时,需 对功率和力进行限制。
协作机器人与人作业过程中可能产生的碰撞 有2种接触方式:静态接触和动态接触。其中,静 态接触指操作者被卡或者压在机器内部无法逃 离;动态接触指操作者在操作过程中被正在作业 的机器人短暂碰撞。两者的限值要求存在一定的 关系,如图2所示。通常情况下,动态限值是静态 限值的2倍。
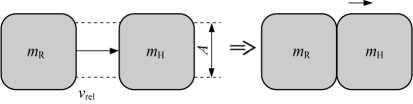
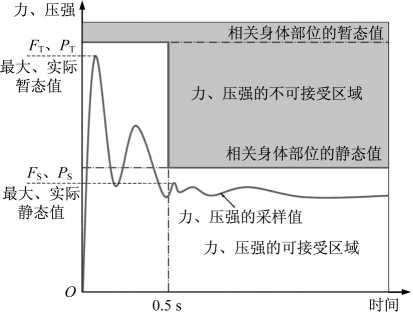
图2 可接受与不可接受力、压强示意图
针对功率和力的风险点,风险减小的措施有:
(1)增加协作机器人与人的接触面积;
(2)在机器人手臂上增加能量吸收物,降低 机械碰撞力对人的影响;
(3)减轻机器人手臂的重量。
本技术规范将人体分为29个部位进行测试, 如表2所示。测试内容包括静态及动态的压力、 压强,并给出了人体对机械碰撞的可接受程度的 限值。
在ISO/TS 15066标准中,采用了尺寸为 1.4 cm ×1.4 cm的测试仪器对机械力开展了测 试试验。标准中强调该测试方法所得到的测试结 果很大程度上依赖于所使用的测试仪器,一致性 有待提高。
针对能量传递的测试,ISO/TS 15066: 2016标 准建立了一个简单的双体模型,如图3所示。在 该模型中,机器人处于运动状态,人体处于静止状 态,机器人(有效质量mR)以相对速度Vrel与人体 (有效质量mH)发生碰撞,碰撞过程默认为非弹 性碰撞,即相对动能完全被人体吸收,模型始终处 于静止状态。
— 72 —
|
图3 能量传递的双体模型 表2 人体模型 | |||
|
身体部位 |
具体的身体区域 |
正面/背面 | |
|
1 |
额头中央 |
正面 | |
|
颅骨及额头 |
2 |
太阳穴 |
正面 |
|
面部 |
3 |
咀嚼肌 |
正面 |
|
4 |
颈部肌肉 |
背面 | |
|
颈部 |
5 |
第七节颈椎 |
背面 |
|
6 |
肩关节 |
正面 | |
|
背部及肩膀 |
7 |
第五节腰椎 |
背面 |
|
8 |
胸骨 |
正面 | |
|
胸部 |
9 |
胸肌 |
正面 |
|
腹部 |
10 |
腹肌 |
正面 |
|
骨盆 |
11 |
髋骨 |
正面 |
|
12 |
三角肌 |
背面 | |
|
上臂及肘关节 |
13 |
肱部 |
背面 |
|
14 |
桡骨 |
背面 | |
|
小臂及腕关节 |
15 |
前臂肌肉 |
背面 |
|
16 |
手臂神经 |
正面 | |
|
17 |
食指指垫(显性) |
正面 | |
|
18 |
食指指垫(非显性) |
正面 | |
|
19 |
食指末端关节(显性) |
背面 | |
|
20 |
食指末端关节(非显性) |
背面 | |
|
手部及手指 |
21 |
手掌鱼际区 |
正面 |
|
22 |
手掌(显性) |
正面 | |
|
23 |
手掌(非显性) |
正面 | |
|
24 |
手背(显性) |
背面 | |
|
25 |
手背(非显性) |
背面 | |
|
26 |
大腿肌 |
正面 | |
|
大腿及膝盖 |
27 |
膝盖骨 |
正面 |
|
28 |
胫骨 |
正面 | |
|
小腿 | |||
|
29 |
腓肠肌 |
背面 | |
基于取得的静态及动态的压力、压强限值,根 据协作机器人运动部件的重量,标准给出了末端 执行器的速度要求。
5 验证和确认
本章节参考ISO 10218-2: 2011,条款6的验 证和确认要求。不再赘述。
(C) 1994-2022 China Academic Journal Electronic Publishing House. All rights reserved, http://www.cnki.net
·标准研究与分析·
电器与能效管理技术(2017No.14)
6 使用信息
【参考文献】
本章节参考ISO 10218-1: 2011条款7和ISO 10218-2:2011条款7中的使用要求。主要包括协 作机器人操作的信息说明、协作机器人系统描述、 工作空间应用描述、工作任务描述、电和力限制应 用的信息说明等内容。
7结语
在 ISO 10218-1: 2011 和 ISO 10218-2: 2011 标 准中,提出了 4种人机协作方式,分别是安全级监 控停止、手动引导、速度和距离监控、功率和力限 制。ISO 15066: 2016针对这4种方式在功能描 述、实施细节、状态转换等方面进行了补充完善。
协作机器人的技术规范在国外已经比较成 熟,国内尚无协作机器人相关技术规范,协作机器 人的安全测试现仍依据ISO 102184: 20111 及 ISO102182 2011两个标准,其针对协作机器人安 全的要求、设计、测试等内容不够完善,无法全面 实施协作机器人科学评价,建议相关部门转化或 制定国内协作机器人相关技术规范,助推协作机 器人产业健康发展。
[1 ] IFR Statistical Department. Global survey: human -
robot teams capturing new sectors [EB/OL ]. Germany: IFR, ( 2014 - 12 -02).
[2] HANSON K. Collaborative robots lend a helping hand
EB/OL] . USA: CTE Publications, ( 2015 - 01 -01).
[3]胡明伟,王洪光,潘新安,等.一种协作型机器人运 动性能分析与仿真J].智能系统学报,2017,12 (1) : 75-81.
[4 ] AmericanNational Standards Institute. Industrial robots
and robot SyStemS-Safety requirements: ANSI/RIA R15.06—2012 S .
[5] MATTHIAS B. New safety standards for collaborative
robots,ABB YUmi dual-arm robot: 2015 IEEE / RSJ International Conference on Intelligent Robots and Systems [C] . 2015.
[6] Research project No. FP -0317: Collaborative Robots-
Investigation of pain sensibility at the Man-Machine-Interface[R]. Germany: Institute for Occupational, Social and Environmental Medicine at the Johannes Gutenberg University of Mainz,2014.
收稿日期:2017-07-15
檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿檿
(上接第37页)
4 PCB设计审查和风险评估
当PCB布线布局时,各个电路部分之间的串 扰也是着重需要考虑的。PCB审查风险评估的目 的是为了检查PCB设计者是否将EMC专家给出 的PCB布局布线建议落实。将全部PCB布局布线 的建议吸收会有很大的困难,但是通过审查,EMC 专家与CAD的专家一起能找到一种比较折中的方 法,不但能使EMC风险降低,而且还能顺利实现 PCB布局布线。在PCB审查结果中,EMC专家需 要把一些未落实的或实际实现与建议不一致的现 象一一列出,将有助于产品在EMC测试时定位分 析,主要包括两个方面:
(1)共模电流流过路径上的阻抗,如地平面 是否完整,是否有过孔、裂缝和开槽。
(2)'脏”信号印制线及一些需要进行特殊处理 的信号印制线与其他信号线之间的串扰问题。
5结语
本文所描述的内容仅仅是产品EMC设计风 险评估法中的概要,限于篇幅,不能将所有的内容 都写于此文章中。EMC也是一门有一定深度的 学科,要全部掌握该方法中的所有内容还需要读 者经过专业的培训和学习。
【参考文献】
1]郑军奇.EMC设计与测试案例分析M].北京:电子 工业出版社,2006.
2] 郑军奇.电子产品设计EMC风险评估[M].北京:
电子工业出版社,2008.
[3] Immunity requirements and test methods for equipment subjected repetitive electrical fast transients: IEC 61000-44 1995 S .
收稿日期: 2017-05-20
— 73 —
(C) 1994-2022 China Academic Journal Electronic Publishing House. All rights reserved, http://www.cnki.net